Bộ điều khiển PID cơ bản (P.10)
1. So sánh giữa lý thuyết điều khiển cổ điển và hiện đại

2. Khâu điều khiển
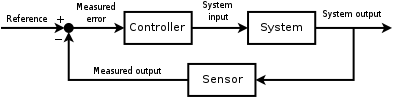
Trong điều khiển tự động, có 3 khâu điều khiển chính, có tên là Khâu điều khiển tỷ lệ (P), tích phần và đạo hàm. Sơ đồ khối của một hệ thống điều khiển mẫu được vẽ ở hình dưới:

Khâu điều khiển tỷ lệ
Loại khâu điều khiển này liên quan đến một hằng số tỷ lệ, gọi là Kp, được định nghĩa như sau:
trong đó U(s) là tín hiệu ngõ ra, E(s) là tín hiệu sai lệch được đo ở miền tần số.
Bạn có thể hiều Kp như là điều chỉnh phím âm lượng của một cái radio vậy. Về cơ bản nó giống như một bộ khuếch đại có thể điều chỉnh được để giúp giảm tác động của nhiễu (sai số). Nếu thông số Kp được thiết lập quá cao sẽ dẫn đến mất ổn định hệ thống và méo dạng tín hiệu ngõ ra sẽ xảy ra. Khâu tỷ lệ nói chung không hữu ích cho việc điều chỉnh sai số xác lập. Nhược điểm của khâu tỷ lệ được khắc phục bằng một khâu khác là khâu điều khiển tích phân.
Khâu điều khiển tích phân
Quan hệ giữa tín hiệu ngõ ra và sai số tín hiệu trong miền tần số của khâu tích phân là:
Trong đó Ki là hệ số khuếch đại tích phân, U(s) là tín hiệu ngõ ra, E(s) là tín hiệu sai lệch. Trong miền thời gian thì độ thay đổi của tín hiệu ngõ ra tỷ lệ với tín hiệu sai số bởi hệ số Ki. Nếu sai số là 0 thì tín hiệu ngõ ra sẽ không đổi (slope = 0). Khâu điều khiển này cũng được biết đến như là khâu điều khiển về không. (reset control).
Khâu điều khiển đạo hàm
Trong khâu điều khiển này, biên độ ngõ ra của bộ điều khiển U(s) tỷ lệ với tốc độ thay đổi của sai số tín hiệu E(s) bởi hệ số KD. Khâu này được mô tả bởi phương trình:
Trong một hệ thống tuyến tính, bộ điều khiển đạo hàm đo độ dốc của sai số tín hiệu, dự đoán trước độ vượt quá lớn, thực hiện điều chỉnh chính xác trước khi vọt lố xảy ra. Bởi vì đặc tính này, bộ điều khiển này được xếp vào loại bộ điều khiển ngăn ngừa (bộ điều khiển dùng trước). Chú ý rằng nếu sai số xác lập của hệ thống là không đổi trong miền thời gian, điều khiển đạo hàm là không có tác dụng vì đạo hàm theo thời gian của hằng số là bằng 0. Bởi vì khâu điều khiển chỉ lam việc tốt ở chế độ quá độ nên nó không nên được sử dụng một mình.
Khâu điều khiển PI (Tỷ lệ cộng với Tích phân)
Kết hợp giữa phương trình một và phương trình 2 ta có:
(4)
Sắp xếp lại phương trình (4):
 (5)
(5)
Trong đó TI = KP/KI là thời gian tích phân hay gọi là tốc độ thiết lập về 0. (lần trên mỗi phút). Tỷ lệ mà Kp được lặp lại. Chú ý là Kp tác động đến cả khâu tỷ lệ và tích phân của bộ điều khiển. Đối với bộ điều khiển tỷ lệ với một ngõ vào là hàm dốc, hệ số Kp sẽ điều khiển hằng số sai số dạng dốc và sau đó tác động đến biên độ của sai số xác lập khác không. Tuy nhiên, nếu ta đặt Kp quá lớn thì hệ thống sẽ trở nên rất không ổn định (đặc biệt là với nhiễu lớn). Đối với hệ thống hệ thống loại 0 thì giá trị của KI ảnh hưởng đến hằng số sai số dốc trong khi Kp ảnh hưởng đến biên của pha, biên của hệ số khuếch đại, đỉnh cộng hưởng và băng tần. Nói chung, khâu điều khiển PI có thể làm tăng sai số trạng thái ổn định, mà là cái giá của sự ổn định của hệ thống. Thêm vào đó, nếu vị trí zero của bộ điều khiển được thay thế chính xác, bạn cũng có thể tăng hệ số suy giảm. Trong thiết kế bộ điều khiển PI, nên giữ zero gần với gốc và cách xa với các cực (poles) có nghĩa nhất, trong khi đó nên giữ cho Ki và Kp nhỏ. Khi thiết kế hợp lý, bộ điều khiển PI có thể tăng hệ số suy giảm nhưng mở rộng thời gian thiết lập. Trong miền tần số, nó có thể làm giảm băng tần và tăng biên của hệ số khuếch đại và pha cũng như đỉnh cộng hưởng.
Khâu điều khiển PD (Tỷ lệ cộng với Đạo hàm)
Dạng hàm truyền của khâu này là:
 (6)
(6)
trong đó TD = KD/KP là thời gian đạo hàm.
Trong chế độ quá độ, khối điều khiển PD có thể tính toán trước được hướng của sai số điều khiển mà từ đó điều chỉnh trước khi sự vọt lố xảy ra. Suốt quá trình ổn định, PD cũng tác động đến sai số xác lập chỉ khi sai số này thay đổi theo thời gian. Trong quá trình thiết kế bộ điều khiển PD, chúng ta muốn thay đổi tần số góc của bộ điều khiển ω = 1/TP để biên của pha được cải thiện với tần số giao chéo – khuếch đại mới. Tác động của bộ điều khiển PD trong miền tần số đó là việc tăng băng tần và giảm nhiễu tần số cao, như vậy bộ PD giống với một bộ lọc thông cao. trong miền thời gian, PD cải thiện hệ số suy giảm trong khi giảm được độ vọt lố cực đại, thời gian thiết lập, và thời gian định vị. PD sẽ không dùng tốt cho hệ thống có độ suy giảm yếu.
Khâu điều khiển PID (Tỷ lệ – Tích phân – Vi phân)
Phương trình sau là sự kết hợp của phương trình (5) và (6) để mô tả hàm truyền của PID:
 (7)
(7)
Bộ điều khiển này mang cả đặc tính của bộ điều khiển PI và PD. Với PI tác động như bộ lọc thông thấp (bộ điều khiển trễ pha) và PD tác động như bộ lọc thông cao (bộ điều khiển sớm pha), PID tác động như một bộ lọc thông dãi (bandpass filter). Phần trễ pha của bộ điều khiển dùng để tăng hệ số suy giảm lên, trong khi đó phần sớm pha được sử dụng để giảm thời gian thiết lập.
Tác động chung của các bộ điều khiển được tổng kết trong bảng sau:


3. Các tài liệu nên đọc
Hale F., Introduction to Control System Analysis and Design, 2nd. ed., Prentice-Hall,1988.
Kou B. C., Automatic Control Systems, 7th. ed. John Wiley & Son, 1995.
Ogata K., Modern Control Engineering, 2nd., Prentice Hall, 1990.
Phelan R. M., Automatic Control System, Cornell University Press, 1977.
Raven F. H., Automatic Control Engineering, 3rd ed., McGraw-Hill, 1978